Linkerd Benchmarks


Update 2021-11-29: we’ve repeated these experiments with the latest versions of Linkerd and Istio.
(Update 5/30/2019: Based on feedback from the Istio team, Kinvolk has re-run some of the Istio benchmarks. The results are largely similar to before, with Linkerd maintaining a significant advantage over Istio in latency, memory footprint, and possibly CPU. Below, we’ve noted the newer numbers for Istio when applicable.)
Linkerd’s goal is to be the fastest, lightest, simplest service mesh in the world. To that end, several weeks ago we asked the kind folks at Kinvolk to perform an independent benchmark. We wanted an unbiased evaluation by a third party with strong systems expertise and a history of benchmarking. Kinvolk fit this description to a T, and they agreed to take on the challenge.
We asked Kinvolk for several things:
- A benchmark measuring tail latency, CPU usage, and memory consumption—the three metrics we believe are most indicative of the cost of operating a service mesh.
- A comparison to the baseline of not using a service mesh at all.
- A comparison to Istio, another service mesh. (We’re frequently asked how the two compare.)
- A realistic test setup for an application “at load” and “at scale”, including an apples-to-apples comparison between features, and controls for variance and measurement error.
- A downloadable framework for reproducing these tests, so that anyone can validate their work.
Today, Kinvolk published their results. You can see the full report here: Kubernetes Service Mesh Benchmarking. Kinvolk measured Linkerd 2.3-edge-19.5.2 and Istio 1.1.6, the latest releases that were available at the time of testing. They measured performance under two conditions: “500rps” and “600rps”, representing effectively “high” and “very high” load for the test harness.
Here’s a summary of their results. (Note that for Istio, Kinvolk tested two configurations, “stock” and “tuned”. We’re looking purely at the “tuned” configuration below.)
Latency
Latency is arguably the most important number for a service mesh, since it measures the user-facing (as opposed to operator-facing) impact of a service mesh. Latency is also the most difficult to reason about, since it is best measured as a distribution.
Kinvolk measured latency from the perspective of load generator, which means that these latency numbers are a function of the application they tested—if the call graph was deeper, we’d see additional latency, and if it were shallower, these numbers would be less. Thus, raw numbers are not as important as the comparisons—how did Linkerd do versus the baseline, and versus Istio?
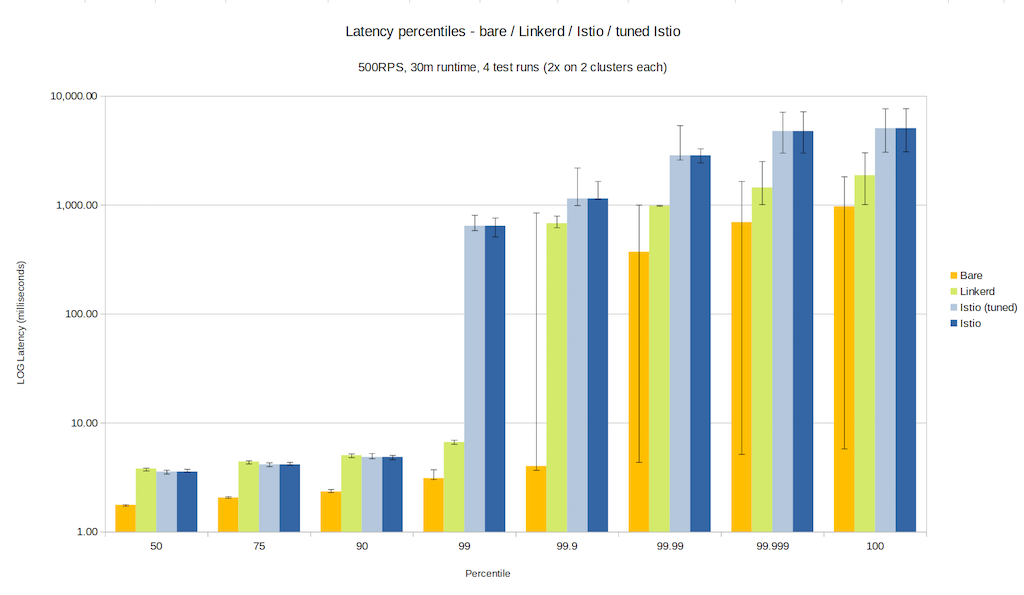
In the 500rps condition, Linkerd’s p99 latency was 6.7ms, 3.6ms over the baseline p99 of no service mesh of 3.1ms. (In other words, 99% of the time, a request without a service mesh took less than 3.1 ms, and 99% of the time, a request with Linkerd took less than 6.7ms.) At the p999 level (the 99.9th percentile), Linkerd’s latency was significantly worse, at 675ms above the baseline’s p999 of 4ms. The worst response time seen over the whole test with Linkerd was a full 1.8s of latency, compared to the baseline’s worst case of 972ms.
By comparison, Istio’s p99 latency in the 500rps case was 643ms, almost 100x worse than Linkerd’s p99. Its p999 was well over a second, compared to Linkerd’s 679ms, and its worst case was a full 5s of latency, 2.5x what was measured with Linkerd.
(Update: Kinvolk’s re-tuned Istio benchmarks dropped Istio’s p99 from 100x that of Linkerd’s to 26x and 59x that of Linkerd’s across two runs. It also dropped Istio’s p999 to just under a second, though still double Linkerd’s p999.)
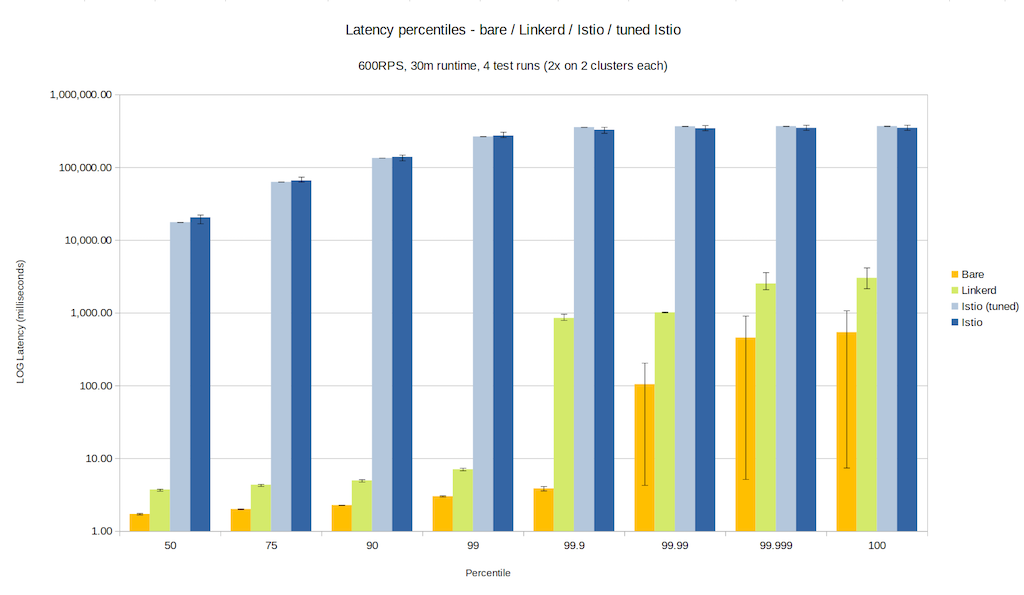
In the 600rps condition, the difference between the two service meshes is exaggerated. While Linkerd’s p99 elevates from 6.7ms to 7ms, 4ms over the “no service mesh” baseline, Istio’s p99 was a full 4.4 minutes (!). While Linkerd’s p999 climbed to 850ms, compared to the baseline of 3.8ms, Istio’s p999 is almost 6 minutes. Even Istio’s p50 (median) latency was an unacceptable 17.6 seconds. In short, Istio was not able to perform effectively in Kinvolk’s 600rps condition.
(Update: Kinvolk’s re-tuned Istio benchmark showed similar performance in the 600rps condition, with p99 latency for Istio remaining in the minutes and median latency between 10 and 20 seconds.)
Summary: Linkerd had a latency advantage over Istio. In the 500rps condition, Istio’s p99 was 100x of Linkerd’s. in the 600rps condition, Istio’s latency was unacceptable throughout. However, both meshes introduced significant latency at the 99.9th percentile compared to the baseline in the 500rps condition.
Memory consumption
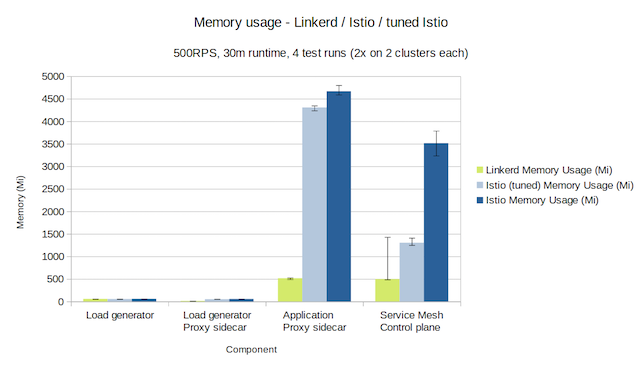
At 500rps, Linkerd’s memory usage was 517mb across all data plane proxies (averaging 5.7mb per proxy), and a little under 500mb for the control plane itself, for a total of ~1gb of memory. By comparison, Istio’s memory usage was 4307mb across all data plane proxies (averaging 47mb per proxy), and 1305mb for the control plane, for a total of almost 5.5gb.
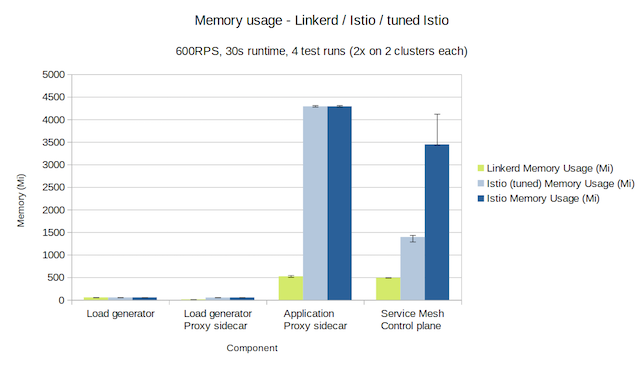
The situation was almost identical in the 600rps condition. Of course, both meshes suffer greatly when compared to the baseline usage of 0mb!
(As a side note, 25% of Linkerd’s control plane memory usage in these runs was its Prometheus instance, which temporarily stores aggregated metrics results to power Linkerd’s dashboard and CLI. Arguably, this should have been excluded, since Prometheus was disabled in Istio.)
Summary: Linkerd had a clear memory advantage. Istio consumed 5.5x as much memory as Linkerd. Linkerd’s data plane, in particular, consumed less than an 1/8th of the RAM that Istio’s did.
CPU consumption
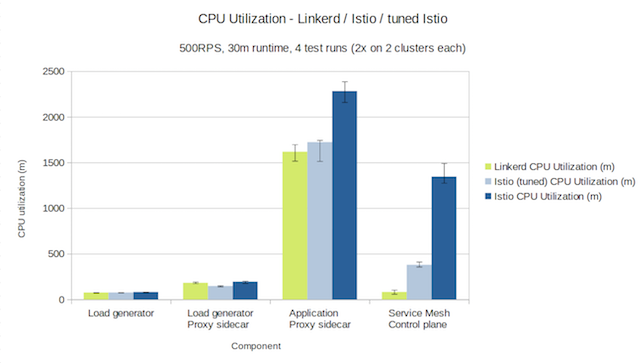
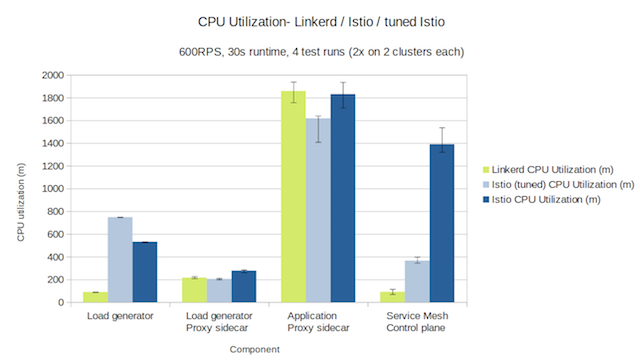
When measuring CPU consumption, the two meshes product comparable results. In the 500rps run, Linkerd’s data plane proxies took 1618mc (millicores) cumulatively, and its control plane consumed 82mc, for a total of 1700mc. Istio’s data plane proxies consumed 1723mc and its control plane consumed 379mc, for a total of 2100mc, a 23% increase over Linkerd. However, in the 600rps run, the results were flipped, with Linkerd taking 1951mc vs Istio’s 1985mc. In this run, Linkerd’s data plane at 600RPS condition consumed 15% more CPU than Istio’s. (Though it should be noted that, since Istio was not able to actually return 600rps, it’s not entirely a fair comparison to Linkerd.)
Summary: CPU usage was similar Linkerd and Istio. Linkerd’s data plane CPU utilization was higher than Istio’s in the 600rps condition, though it’s hard to know how real this result was because Istio was not able to fully perform in this condition.
(Update: Kinvolk’s re-tuned Istio benchmarks showed a “massive increase in CPU usage of Istio’s proxy sidecar”. While no numbers were reported, from this description it is clear that Linkerd’s CPU usage was less than Istio’s in this configuration.)
Conclusion
Overall we are happy with Linkerd’s performance in this test, and we’re very happy to have a thorough quantification of the relative cost of introducing a service mesh, and a publicly available, reproducible harness for running these benchmarks.
We’re pleased to see that Linkerd has a very significant advantage in latency and memory consumption over Istio. While CPU usage was comparable, we feel that Linkerd can do better. We suspect there is low-hanging fruit in linkerd-proxy, and we’re eager to see if a little profiling and tuning can reduce CPU consumption over the next few releases. (And we’d love your help – hop into the Linkerd Slack or come talk to us next week at Kubecon EU!)
In the future, we hope that projects like Meshery can provide an industry standard approach for these sorts of benchmarks in the future. They’re good for users and good for projects too.
We’re impressed by the thoroughness of Kinvolk’s tests, and we’d like to thank them for taking on this sizeable effort. The full report details the incredible amount of effort they put into building accurate test conditions, reducing variability, and generating statistically meaningful results. It’s definitely worth a read!
Finally, we’d also like to extend a huge THANK YOU to the kind folks at Packet, who allowed Kinvolk to use the CNCF community cluster to perform these experiments. The Linkerd community owes you a debt of gratitude.
Linkerd is a community project and is hosted by the Cloud Native Computing Foundation. If you have feature requests, questions, or comments, we’d love to have you join our rapidly-growing community! Linkerd is hosted on GitHub, and we have a thriving community on Slack, Twitter, and the mailing lists. Come and join the fun!
Image credit: Bernard Spragg. NZ